INT: Robotic Building Blocks
B-Pro Design Computation Lab - Research Cluster 4, The Bartlett School of Architecture, UCL
Tutors: Gilles Retsin, Manuel Jiménez García with Vicente Soler
Students: Zoey Tan, Claudia Tanskanen, Qianyi Li, Xiaolin Yin

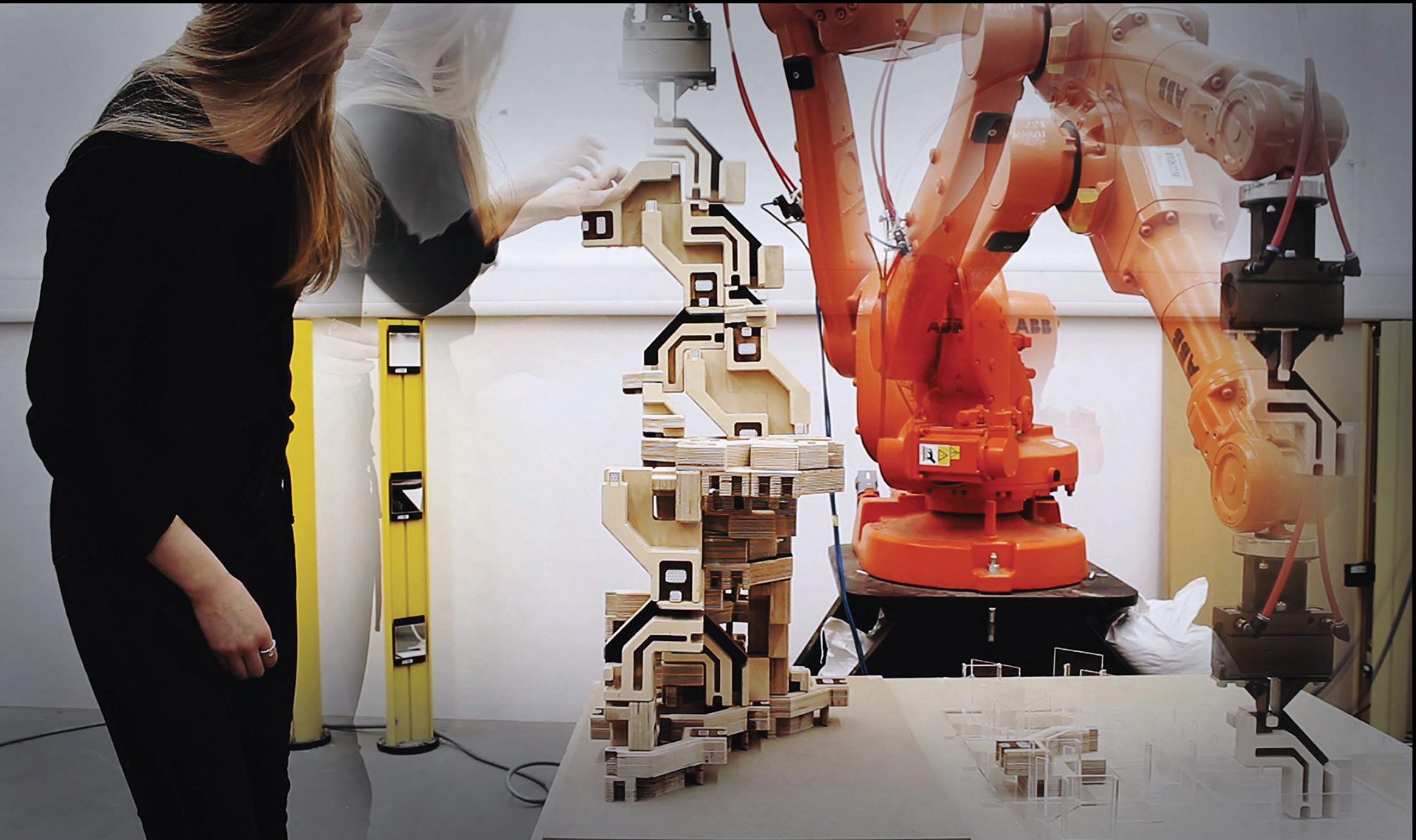
INT aims to introduce complexity in prefabrication. The team looks into robotic assembly of robotic bricks while also addressing the relation between users and robots. Through implementing feedback in the robotic assembly process, human interaction is incorporated. The design process becomes truly indeterminate and plays out in physical space, allowing for variegating degrees of customisation and order. On the architectural scale, the project establishes a meaningful relation between degrees of order, fabrication method and human interaction.
INT addresses a gap in architecture and its production and speculates what role a user can have in the process robotic fabrication. The team has created a digital building block that combines with itself in different ways and that can be robotically assembled. These combinations can be written as rules in a code which ultimately allows for the creation of an automated design.
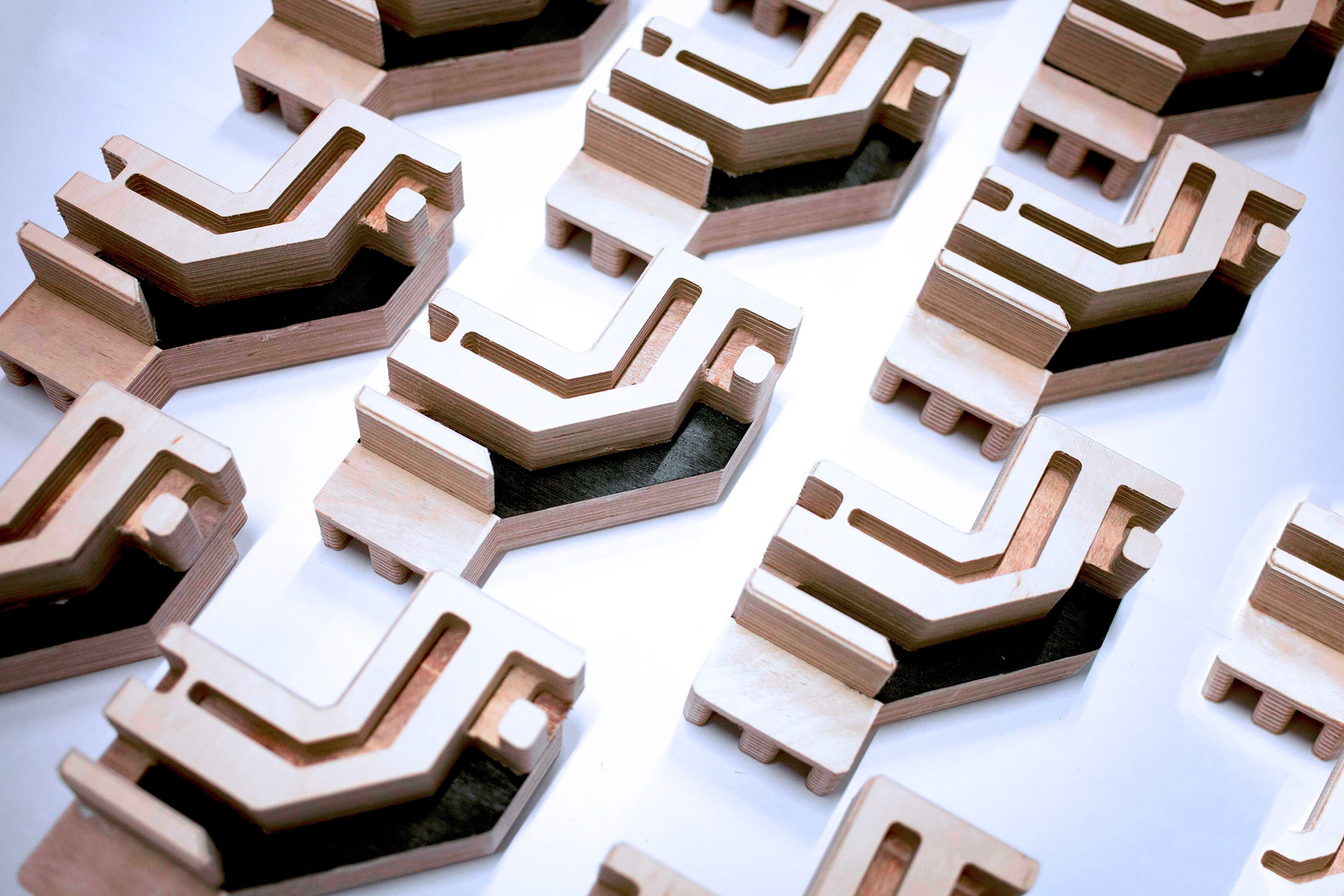
These digital blocks can be assembled with a robot in an easy pick and place manner where a gripper can grip the block from specifically designed gripping spots. These gripping spots define the geometry of the brick. The robotic blocks can also be tracked by cameras during the assembly process, so the robot has a understanding of the structure it is building, and can react to possible mistakes. This also opens up possibilities for interaction with humans. When elements are added by a human, they can be detected and responded to by the robot. In such a system a human and a robot can collaborate in the creation of a design.




INT: Robotic Building Blocks
B-Pro Research Cluster 4, the Bartlett School of Architecture, UCL
Tutors: Gilles Retsin, Manuel Jiménez García with Vicente Soler
Students: Gilles Retsin, Manuel Jiménez García with Vicente Soler
Technical assistance: B-Made
Website : http://www.discretedesignlab.com/






About RC4:
The Bartlett School of Architecture’s BPro Research Cluster 4 (RC4), lead by Gilles Retsin, Manuel Jimenez Garcia and Vicente Soler, develops design methods for robotic fabrication. In previous years, RC4 has experimented with 3D printing, using industrial robots. These processes were tested on furniture pieces, such as a plastic chair (http://www.dezeen.com/2016/02/05/bartlett-students-ucl-3d-printed-filigree-chairs-robots/ ) and a concrete table (http://www.dezeen.com/2016/01/21/amalgamma-develops-3d-printing-concrete-technique-building-structures-bartlett/ ). However, these 3D printing processes remain time-consuming, and have difficulties with multi-materiality. Moreover, if a mistake occurs during the printing process, the whole object has to be printed again - there is no “undo-button”. 3D printed objects are not reversible, and can not be recycled easily.
A new generation of research initiated by RC4 moves into Discrete Robotic Assembly, rather than 3D printing. Essentially, this process assembles lego-like building blocks into complex forms. Just like Lego’s, these standardised building blocks are always the same. Rather than using the robot to craft a complicated form with hundreds of different elements, the complexity here emerges from the combination of simple building blocks. These building blocks can be understood as “voxels” or volumetric pixels - a digital method which is popular in computer visualisations for scientific analysis. Discrete Robotic Assembly is inherently faster than 3D printing and other forms of robotic assembly. It reduces the cost, allows for different materials and at the same time maintains a high level of formal complexity. These properties open the possibility for robotic fabrication to scale up to an architectural scale. A first iteration of research has been tested again on the scale of furniture. Projects include building blocks made of timber, compression moulded plastics, metal wires and extruded plastic.
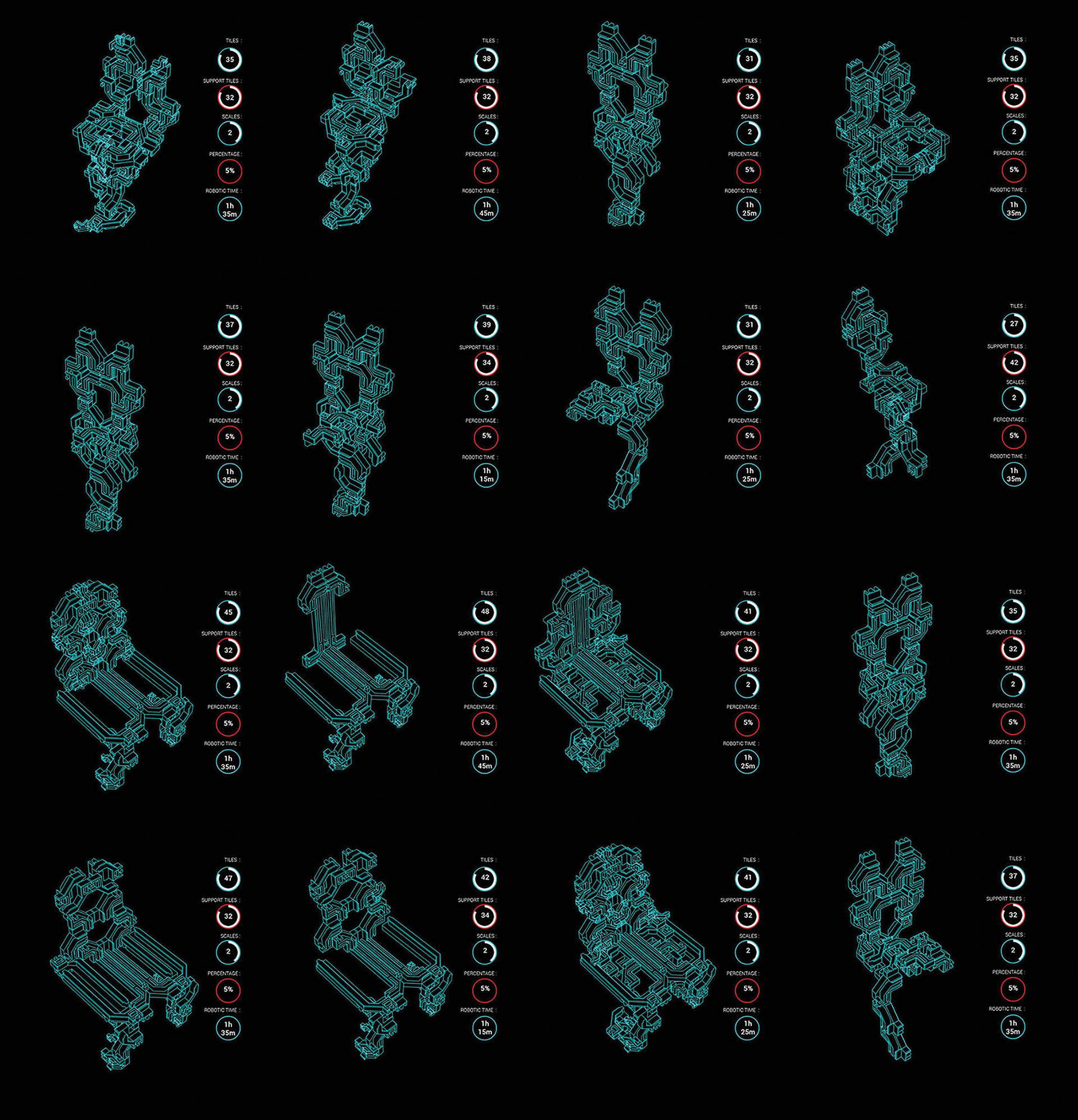
The different combinations of blocks are structurally evaluated in terms of surface area. In areas of a design that require more strength the ratio of blocks with high surface area overlaps are much larger. The coding of the block and the surface area calculation that it provides also allows for optimization of a design. Tiles can be added or deleted according to different variables such as cost, time it takes to assemble or user preferences.
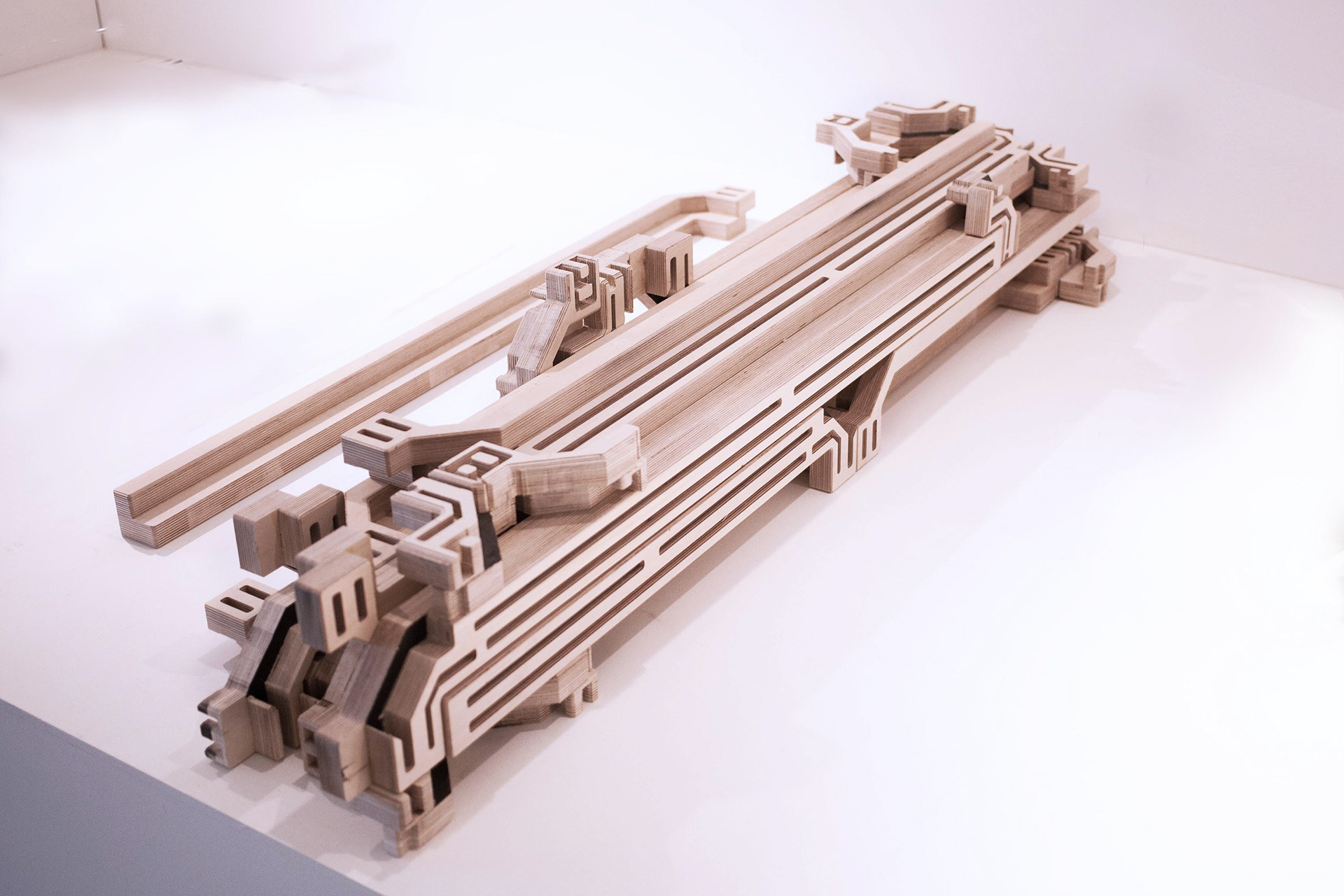
There is only one type of elements used, on two different scales: a small brick and a larger tile. To address different architectural and structural requirements, the team also introduced an elongated tile for larger elements. The elongated tile is also coded to be part of the automated design system.
The building system was tested on two chairs that demonstrate the varying degrees of human involvement in the design process. The so called “mutant chair” is an optimized outcome, emerging only from robotic constraints and algorithmic logics, it has no human design input. This is what the robot thinks is chair. The mutant chair can be constructed in a few minutes, as it makes use of a minimum amount of elements and combinations.
The second chair is a “high resolution” chair, which has been authored by the students, playing around with the design system. The chair has a symmetrical bias, and makes use of a high amount of different pattern combinations, resulting in a slightly longer construction time.
Furthermore, the team also designed an architectural column of 2.3m , which consists of two prefabricated elements.